高速智能垃圾分拣系统
由宋朝阳助理教授负责的仿生设计与学习实验室研制了一套高速智能系统。该系统具有广阔的商业前景和应用价值,特别是在垃圾分拣、农业分拣等场景。我们对该系统进行了商业转化尝试,并在第13届“挑战杯”广东大学生创业计划竞赛中获得铜奖。
项目背景
可持续发展理念、“绿水青山就是金山银山”、新修订的《固体废物法污染环境防治法》都凸显了生态文明建设的重要地位,而垃圾分类是生态文明建设的重要组成部分。为响应生态文明建设的号召和时代发展的需要,我们提出了高速智能垃圾分拣系统的设计方案,利用现代技术为再生资源循环利用和生态文明做出贡献。

ASYST系列产品
Picking ASYST是面向垃圾识别与分拣的自动化智能系统,将人工智能与高速拣选相结合,可实现全天候自主运行。本系统集成多项创新技术,采用专门面向垃圾分拣的自主开发的高速工业机器人ASYST Robot,并结合自主设计的自适应灵巧柔性夹爪ASYST Picker以及智能识别分拣决策脑ASYST Brain,可帮助用户在保持各类别物品的高纯度的同时,提高垃圾识别和拣选速率,进而替代人工分拣,并增加利润。
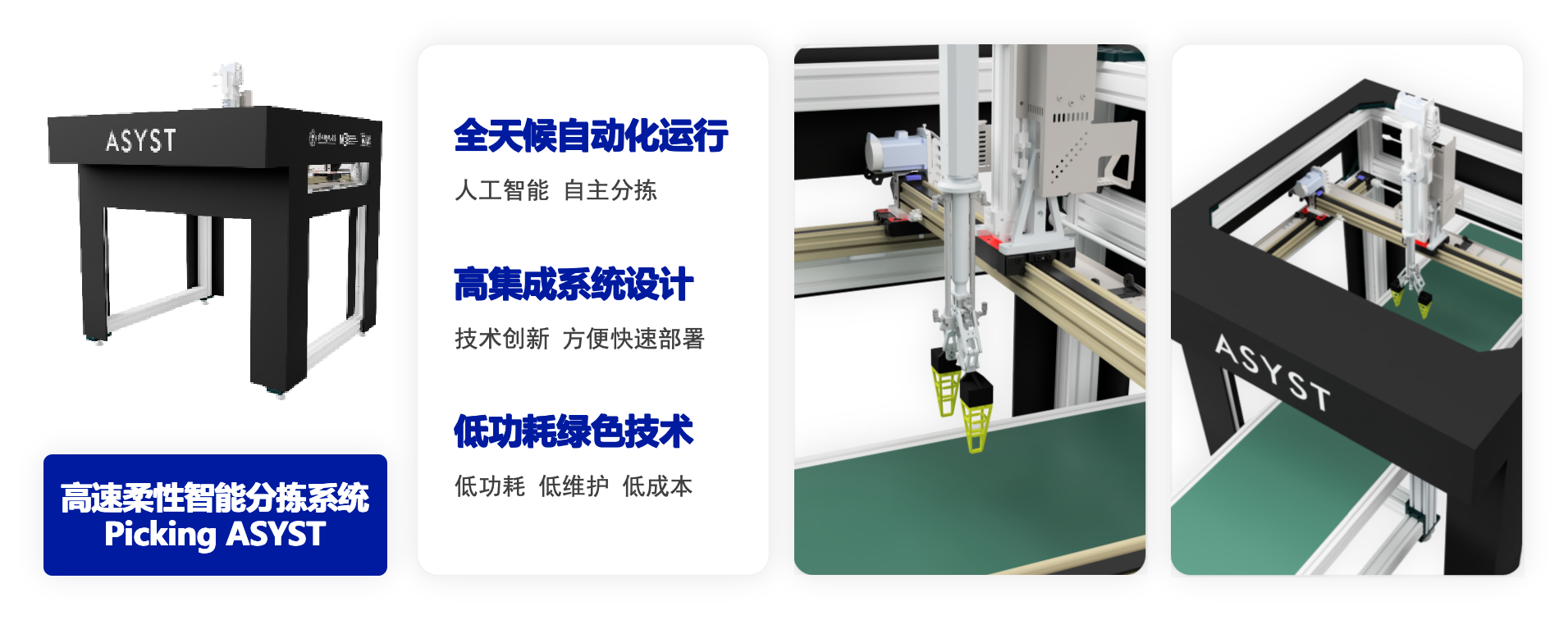
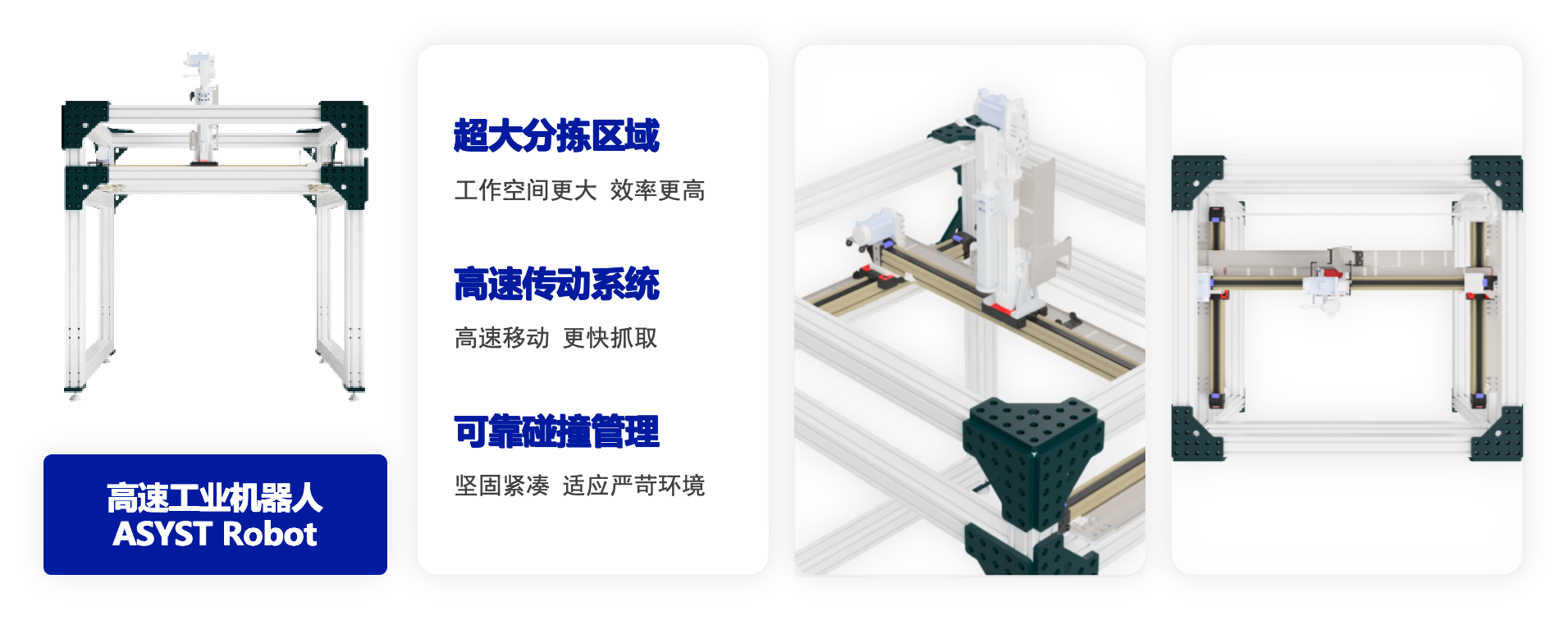
机器人ASYST Robot,可以实现在传送带范围内最大分拣区域。矩形工作区域允许ASYST Robot在更大空间内有更多时间追踪并捕获目标物体,且ASYST Robot工作空间完全覆盖传送带,效率更高。同时,ASYST Robot具有可靠的碰撞管理,可适应严苛的垃圾分拣环境。其坚固紧凑的结构框架,搭配柔性夹爪设计,允许基站在遇到意外物体时可以自由碰撞并规避损害,有效提升设备安全性。
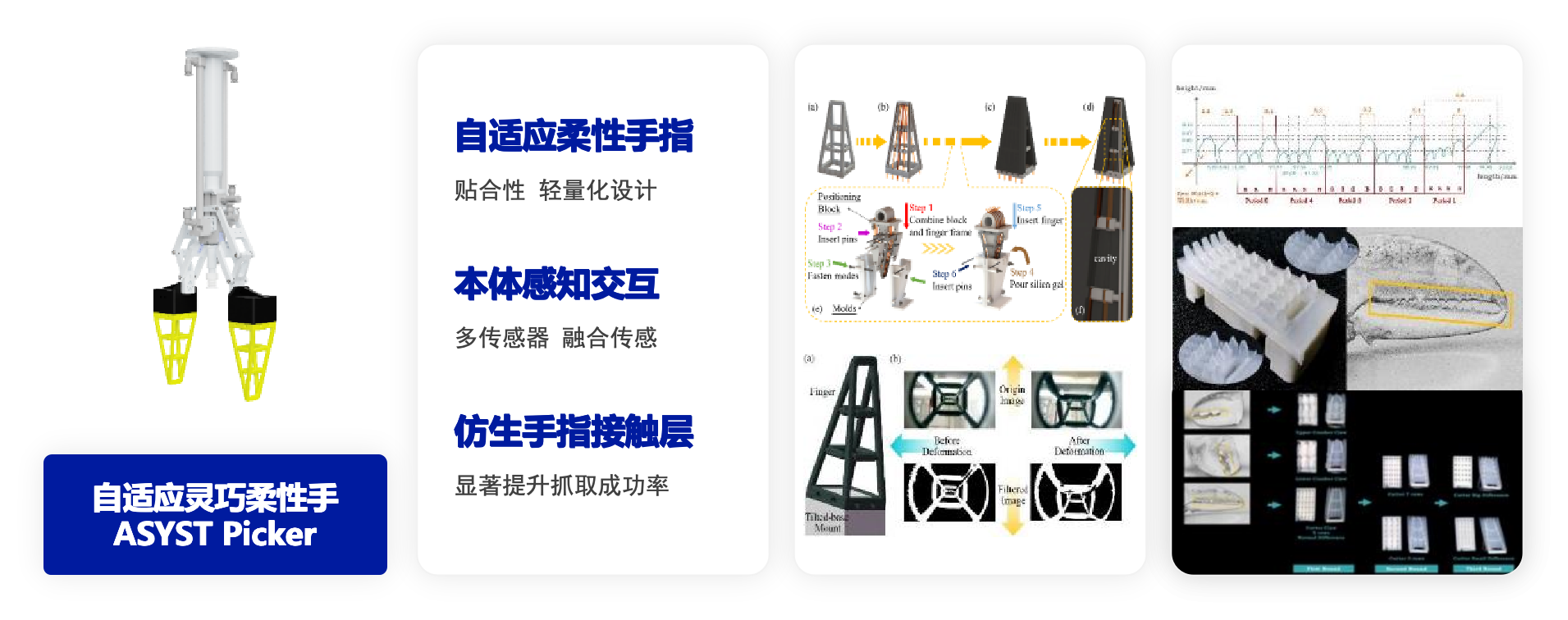
自适应灵巧柔性手ASYST Picker是配套开发的高精度机器人末端执行器。ASYST Picker采用模块化设计,由基座、动力机构、吸盘和手指组成,易于更换维护,有效解决高精度传感夹爪成本高、不易维护的痛点。ASYST Picker具有吸盘吸取和手指夹取两种抓取模式,可根据目标物体特点自动选择,提高抓取效率:吸盘抓取力强、速度快,可用于抓取形状规整、质量较大的物体;手指具有差分刚度柔性结构,并采用了仿生接触层设计,增强对目标物品包覆效果,对提升抓取复杂结构物体的成功率效果明显。ASYST Picker还安装有基于光纤传感器、视觉传感器等多传感器的融合传感方案,配合自适应抓取算法,可有效提高抓取精度和效率,方便应用于垃圾分拣场景下的多种类物品高速稳定抓取。
自主研发的智能识别分拣决策脑ASYST Brain,采用自主开发的垃圾识别分类算法,搭配视觉传感器、热成像传感器等识别采集传感阵列,可实现对被检测物体的毫秒级追踪识别和抓取决策。为适应各类别垃圾分拣场景下的庞大数据容量,ASYST Brain采取“边云协同”技术,系统在工作过程中可自动记录物体特征数据并上传至云端服务器,依靠强大的云端算力对收集的海量数据进行分析学习,不断优化已有识别网络,并定期更新至边缘Picking ASYST,以应对未来更复杂的识别分类挑战。

Picking ASYST系统采用模块化设计,使得根据业务需求量身打造定制化产线成为可能,期望带来从设计到部署简单快捷专业的用户体验。在自研可视化设计平台Design ASYST上,用户可以根据自身业务需求,并结合平台工程师的专业指导和建议,自主选配相应组件和功能,获得专属系统设计。在软件层面上,自研图形化编程平台Machine ASYST为用户大幅降低编程门槛,无需代码程序编写,即可快速操控所设计的系统,完成平台仿真和程序调试。在硬件设计和软件调试完成后,用户可在平台上直接下单生产,并监督订单流程。用户收到产品后,可轻松完成组装和系统实地调试,或选择工程师上门服务。在经过最终系统测试后,Picking ASYST即可上线运行。
